

Información
El sensor QTR-8A desarrollado por AVIG Tech es un módulo de detección óptica basado en tecnología de reflectancia infrarroja, diseñado para aplicaciones de robótica educativa e industrial ligera.
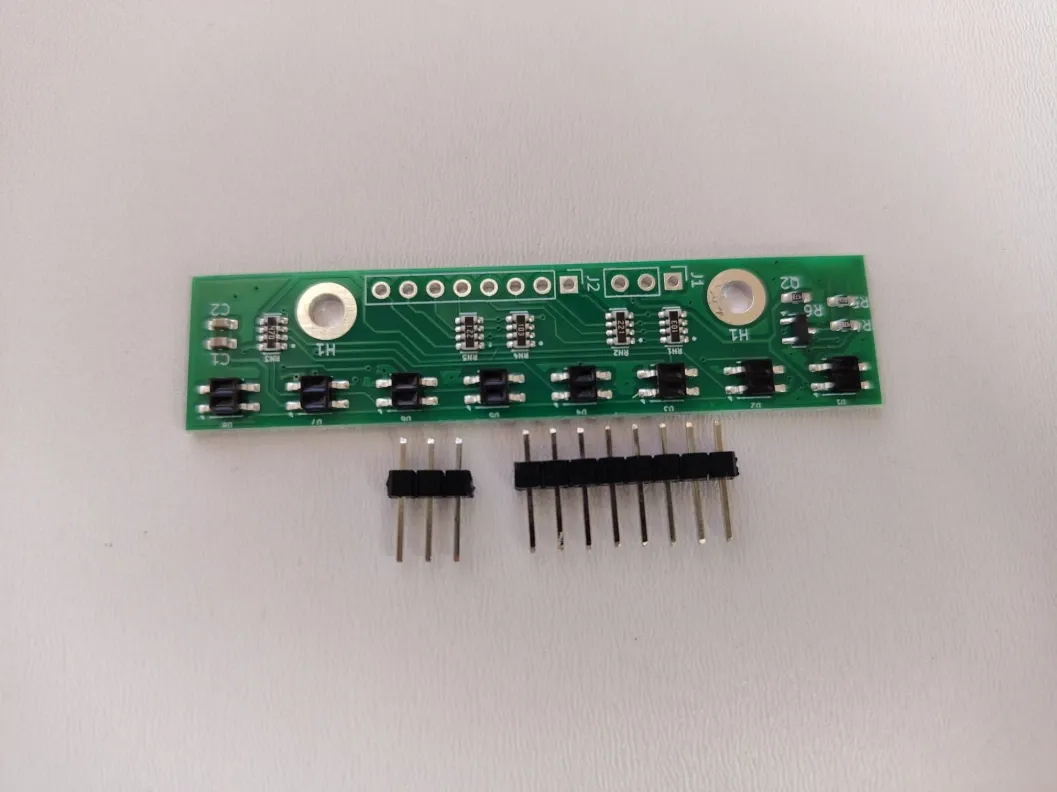
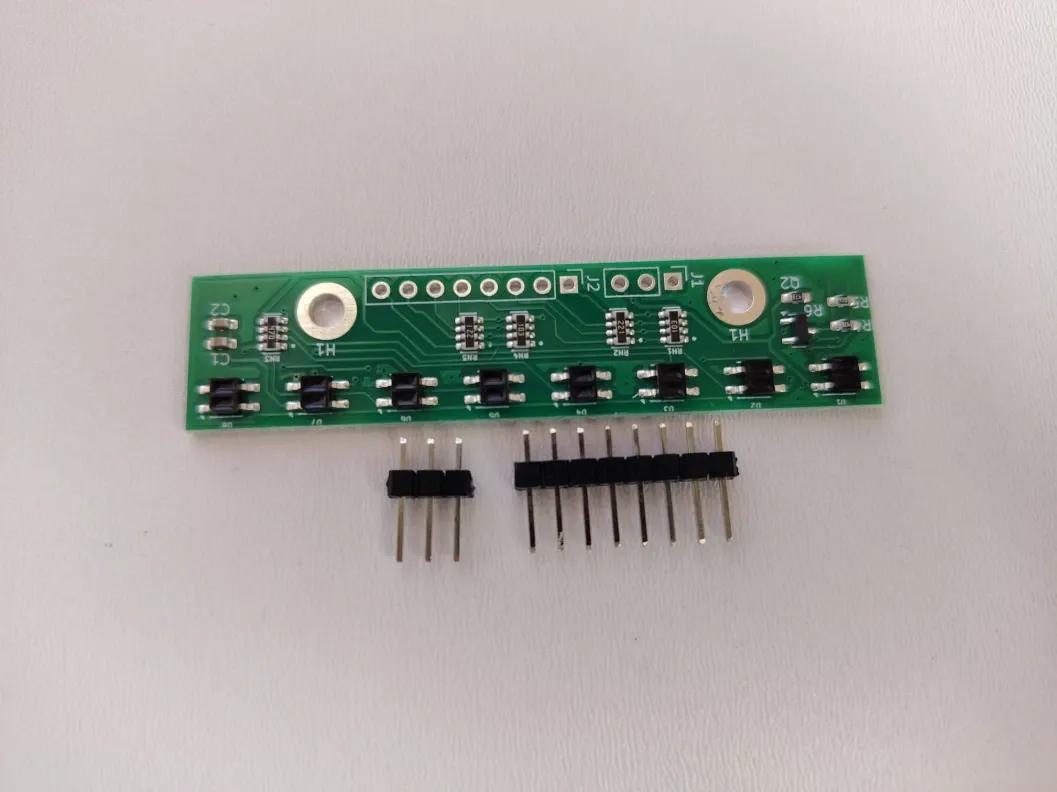
El sistema está compuesto por un arreglo lineal de 8 sensores reflectivos tipo QRE1113GR, capaces de detectar variaciones en la reflectividad de superficies mediante la emisión y recepción de luz infrarroja.
Basado en el diseño de QTR-8A genérico incorpora un control activo de iluminación mediante un MOSFET BSS138, permitiendo activar o desactivar los emisores IR para mejorar la precisión en entornos con interferencia lumínica.
El módulo entrega señales analógicas independientes por canal, lo que permite realizar procesamiento avanzado como cálculo de posición de línea, control PID y filtrado digital.
Especificaciones y características
Características eléctricas
- Tipo de salida: Analógica (8 canales independientes)
- Voltaje de operación: 3.3V – 5V
- Consumo típico: 80 – 150 mA (con IR activo)
- Control de emisores IR: Sí (pin dedicado)
- Tecnología de conmutación: MOSFET de canal N (low-side switching)
Sensado óptico
- Tipo de sensor: Reflectivo infrarrojo
- Longitud de onda IR: ~940 nm
- Resolución: 8 puntos de detección lineal
- Distancia óptima de operación: 3 – 10 mm
- Tiempo de respuesta: < 1 ms
Arquitectura electrónica
- 8 sensores QRE1113GR
Redes de resistencias SMD (arrays) para:
- Polarización de fototransistores
- Limitación de corriente en LEDs IR
- Etapa de conmutación IR con MOSFET BSS138
- Capacitores de desacoplo para estabilidad de señal
- Salidas analógicas directas para ADC (ESP32, Arduino, etc.)
Aplicaciones
El sensor QTR-8A está diseñado para integrarse en múltiples sistemas dentro del ecosistema AVIG Tech y proyectos de robótica en general:
Robótica móvil
- Robots seguidores de línea
- Robots tipo diferencial
- Navegación sobre pistas definidas
- Competencias de robótica (velocista, laberinto)
Valor Agregado
- Compatible con plataformas educativas.
- Enseñanza de sensores y control
- Implementación de algoritmos PID